系統介紹
磁條導航舵輪AGV主要應用于1噸以上負載的貨物搬運,采用舵輪結構能夠更加靈活的實現多方位運動,通過頂升、共同與平臺的配合,提高搬運效率,減少了人工成本和時間成本,提升工廠生產自動化。
應用場景
負載量:適用于1噸以上負載的貨物搬運。
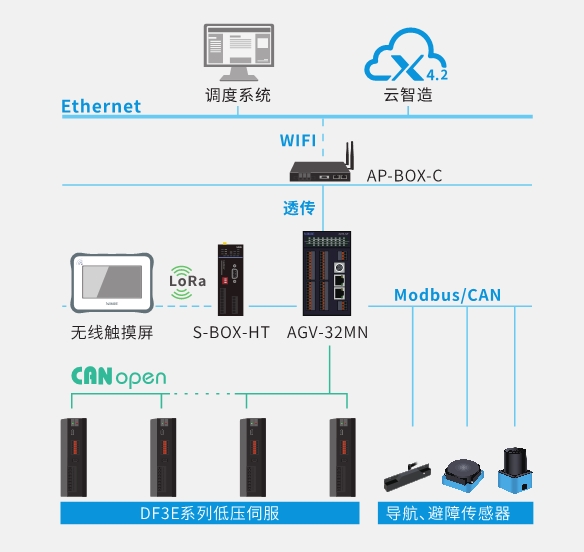
控制方案
控制系統采用舵機(驅動+旋轉)的方式進行驅動控制,通過磁導傳感器檢測到的數據對舵機旋轉軸的轉向角度進行控制,配合計算得到的驅動軸速度,實現在運動過程中的糾偏和轉向,保證AGV能夠穩定沿著設定的任務路徑行走。
當RFID傳感器檢測到AGV行走路徑上布置的功能標簽卡時,AGV開始執行岔路選擇、原地旋轉、停止等功能,實現AGV的導航控制、功能控制以及安全保護。
技術參數
磁條導航
導航方式
舵輪控制
控制方式
雙向行走
運行方向
前進、后退、原地旋轉、平移
行走功能
±10mm
定位精度
±10mm
行走精度
0-40m/min
運行速度
0-4000kg
負載能力
緩停、急停
停止方式
激光避障、安全觸邊
防護方式
3米可調
防護范圍
單舵輪、雙舵輪、四舵輪
底盤模型
方案優勢
保證快速落地
標準化整車控制程序,項目快速落地。
支持二次開發
具有標準化底層運動控制接口,支持邏輯層進行自主二次開發。
多種運動控制算法
具有多種車型的運動控制算法(單舵輪、雙舵輪、四舵輪等),滿足客戶不同現場需求。
路徑靈活
支持可視化路徑編輯、單機自主路徑規劃、聯機系統調度。
參數可視化
無線屏通訊,可視化參數、便捷修改。
定制化服務
提供定制化服務,滿足客戶需求。