移動機器人系統(tǒng)——AGV調(diào)度系統(tǒng)
移動機器人系統(tǒng)——AGV調(diào)度系統(tǒng)

高效靈活、可靠穩(wěn)定
隨著信息化大數(shù)據(jù)應(yīng)用的普及,傳統(tǒng)的倉儲、物流運作方式已無法滿足飛速增長的業(yè)務(wù)需求,必須加快倉儲、物流的自動化和智能化建設(shè)。引入智能倉儲,可高效對接生產(chǎn)與物流,提高企業(yè)的生產(chǎn)效率。針對不同的環(huán)節(jié),信捷以解決行業(yè)痛點為出發(fā)點,經(jīng)過大量現(xiàn)場測試,積累了豐富的現(xiàn)場調(diào)試經(jīng)驗,開發(fā)了不同的解決方案,可實現(xiàn)快速落地、系統(tǒng)長期穩(wěn)定運行。
系統(tǒng)介紹
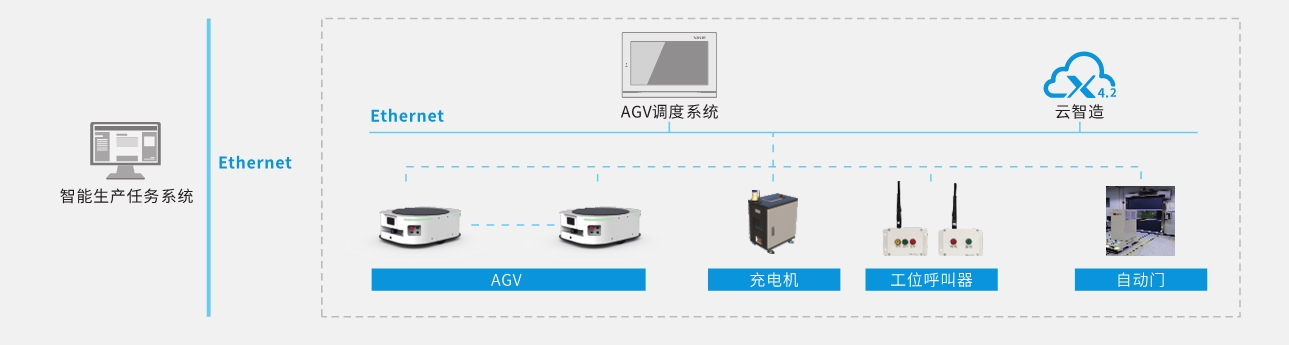
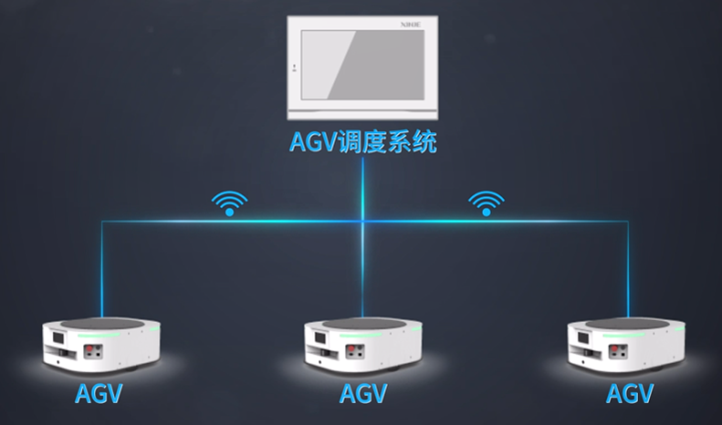
系統(tǒng)主要是針對多臺AGV在同一應(yīng)用場景運行時,將系統(tǒng)作為主站與AGV、充電機、工位呼叫器等從站部署到同一局域網(wǎng)中,根據(jù)任務(wù)數(shù)據(jù)自動分配車輛,并對多臺AGV進行路徑規(guī)劃、交通管制、指令下發(fā)、自動充電等功能,同時實時監(jiān)控車輛狀態(tài)信息、報警信息、當(dāng)前位置等,滿足運行路線較多、且運輸頻繁復(fù)雜的應(yīng)用場景。
應(yīng)用場景
?于AGV數(shù)量較多、運?路線較多、且運輸頻繁復(fù)雜的場合。
控制方案
控制系統(tǒng)采用雙輪差速的方式進行驅(qū)動控制,通過激光避障、安全觸邊等信號的采集、相機對場地鋪設(shè)的二維碼進行拍照讀取和慣性導(dǎo)航傳感器的實時數(shù)據(jù)傳輸進行處理、計算,將離散的二維碼構(gòu)成連續(xù)路徑,來實現(xiàn)糾偏控制,保證AGV能夠在場地中穩(wěn)定行走。并控制AGV能夠?qū)崿F(xiàn)前進、后退、原地旋轉(zhuǎn)、停止等功能,滿足實際使用中的導(dǎo)航控制、功能控制以及安全保護。